Links
Tags
Building a Custom Flight Controller for an Airbus A320
Continuing on from my Christmas Blog Post series, this one might very well be the start of building an A320 home cockpit but I make no promises here. One might even call it ramblings of a software developer who has discovered the hobby of 3D printing.
A trip down memory lane...
Among my earliest childhood memories around the Amstrad CPC6128 is one of my favourite games - Acro Jet. It's not a particularly interesting simulator to retrospect on, but the mind of a 4-5 year old can be quite powerful. Neither were F-16 Fighter for the Sega, Top Gun on the Nintendo Entertainment System, and any of the other many flight games on early 8-bit computers and consoles. Fast forward some 5 or 6 years and Microsoft Flight Simulator for Windows 95 was the new hotness. Armed with the Australian Scenery Pack, one could now fly under Sydney Harbour Bridge and... that's about it. Suffice to say, the complexities of aircraft never really hit home - nor could I ever land the planes, no matter the tutorial.
While at university, I saw Flight Simulator X in the bargain bin at one of our common game stores. It was the Accelerated pack, with manuals and all the glossy artwork. In there were several airliners and even though Melbourne Airport was pretty plain, it certainly resembled it more-so than the earlier games. What really enticed me to look at it was the multiplayer aspect - having the ability to be ATC or communicate with someone playing the ATC role. I would go on to play on and off for several years learning bits and pieces - but never taking it too seriously.
Some time around 2014, I had come across some YouTube videos on an Airbus A320 modification for Flight Simulator X. I hadn't looked into Prepar3d or any of the other flight simulators at the time, but this video would describe in detail how to do a cold start, key in your flight path, fuel planning and had some pretty impressive sounds and realism - compared with the stock A320 anyway. This got me interested as it was presented in a very palatable way. Checklists, flying and landing. I would soon after buy the aircraft and learn how to fly the A320 and have a lot of fun doing so for many years to follow. I've been through other simulators as well, including the defunct Flight Sim World, but suffice to say up to the Microsoft Flight Simulator 2020 launch, it's a plane and game I would return to time and time again.
When Flight Simulator 2020 finally released, I had a few weeks to play before my son was born. It was incredible. The stock aircraft were pretty well featured, if not a bit too easy to fly and the scenery was substantially improved - particularly for Sydney Airport (I'd purchased several airports over my time in FSX to improve realism). But... when you start building up those flight hours, get random crashes - it can leave a sour taste behind. Enough at least that I hadn't really played it for over a year since picking it up recent weeks again.
Some 100GB update later, and I note that most of my modifications have been removed, broken or replaced and unfortunately it felt like I was at step 1 all over again (this game has a serious problem in having many tools to modify the game). I remembered somewhere along the line, an open source effort to replicate the Airbus A320 was underway and thought I'd go and check it out. This didn't go so well - involving a total re-install of the game at a further 150GiB. After getting it all up and running again - with the A32nx mod installed (and of course, with a few liveries) - I'm ready to check out where I left things.
Comparing Flight Simulator X (and Aerosoft A320 mod) to Flight Simulator 2020 (and A32nx mod), you'll immediately notice a few things:
- The graphics in FS2020 are incredible compared to FSX - the scenery, motion, etc... feels a heck of a lot more realistic.
- The camera itself is also tilting, I guess just as your head would in a real aircraft.
For #2, this presents a real problem when trying to set any of the aircraft's flight control unit controls - because as you're trying to set an altitude while scrolling your mouse wheel, you may - due to motion - start changing heading, turning off controls, or setting your vertical speed for a nosedive. Suffice to say, this level of "realism" is completely useless for functionally while playing the game.
I've always wanted to build a home cockpit of sorts - there'd be a number of caveats of course. It would have to be compact and modular enough to store away when not in use. It'd also have to be for an aircraft I fly a lot. I'd want it to be familiar enough - but no need to be a perfect replica (I'm not a pilot after all, this is purely for fun) and I'd have to have fun building it as well. Suffice to say, the issue of motion annoys me so much that turning it off removes that feeling of realism so that really leaves me with building a modular set of flight controls.
Building a home cockpit is as old as Flight Simulators themselves, so there's a lot of material around on how to build one. Two of my favourite ones include The Warthog Project and Heli Mech who builds a Boeing 737 cockpit. The latter channel goes through how to build a lot of panels and components a number of different ways and his style has given me a few ideas on how I could similarly approach an Airbus A320 variant - at least in appearance. Over time, I'm sure I'll be adding a CNC machine to my collection but until then, I want to exhaust what it is that I can build using stuff I already own before investing in more garage clutter.
What can I 3D Print?
Heli Mech recently released a video using mostly off the shelf components and some 3D printing on a printer that has a much larger print bed than I do. It would be fairly easy to copy this design and Airbus-ify it, but if at all possible - I'd want to try and get it backlit (this design doesn't) and using custom components to mimic the Korry switches instead of using the KD2 buttons this guy uses. There are several videos on YouTube that make use of Laser cutters and Acrylic to cut out 3 plates - usually a White layer, and a couple of transparent layers that will be painted and etched into giving a professional looking finish to a panel. To get the equipment to do this will set you back a good $1,000 after all is said and done - so to start out, I'd like to see how far I can take this particular project to get an acceptable result.
To get started, I really need to see how I'm going to get light through plastic. I begin by designing a 90mm x 90mm canvas at different heights, with text all over them to see what might render well. I've chosen variations between 2mm and 5mm - understanding that 5mm is going to be far too large, but if the text is legible - this might be a trade off I need to make. I then load this into the 3D Printing software and take a look at how the layers are going to print. Obviously the smaller text is going to be tricky - but with a calibrated printer it could be made to work (after the 6 months it's had pushing out Christmas decorations, I'm sure it's anything but level at the moment).
Using some scrap white filament, I'm printing out at 100% infill as the light will need to "push" through and something tells me that light isn't going to be too happy if it's not dense enough. Also - this isn't using transparent filament, it's an opaque white - so no doubt thickness and some seriously bright lights will be required here. Lucky I just finished a project with leftover LED strip that will run super-bright.
After printing, I'll need to use some paint. From the Christmas lights project and the PVC painting, I have some Rustoleum 2x paint - the same as The Warthog Project uses in his example, so fingers crossed at this point that i'll be able to paint that on, use a file and scrape back some of the paint. The result is... not good at all. No light shining through, but I did finally get to an acceptable and legible height. 5mm to be precise is a good height to be totally readable and work with paint being scraped back.

Anyway - that's it for today. I'm going to try and keep these blog posts a little shorter and more frequent as I go. I've already got some working examples of Korry switches (that work) and plenty of gear arriving (potentiometers, rotary encoders, 7 segment displays) - so hopefully within the next couple of weeks I'll have some kind of prototype up and running to improve the flight simulator experience.
Solving Cat Problems and Watering Systems with a Raspberry Pi and Machine Learning - Part 1
I have a son who is now 11 months old and other family members that are allergic to cats so when a neighbourhood cat decides to defecate on the lawn, not only does it smell awful but it poses a number of health implications too. Some of the cats have also taken to climbing up the fence and jump around the roof - waking up everyone at 2:00 AM in the morning. Because it's more than one cat, it's hard to know whose cat belongs to who and the local council wants some $70.00 per cat trap to hire - and that's when they're not all out on loan anyway.
This got me thinking about the ever-growing pile of Raspberry Pi's that I had in my draw for several years. I hadn't really got into GPIO's beyond a couple of 'light an LED' scenarios - I never really had any projects go 'in-flight'. There's always the idea of building a set of Flight Controllers but with various life changes that project has been on the backburner for some time. I also hadn't had much of a look into Machine Learning beyond a few image recognition proof of concepts as I had no real use case for it, until this problem.
One thing cats really hate is water. I figured that if I could get a remotely controlled Solenoid, activated by the front door camera if I can detect the presence of a cat, then this might be a more humane way to scare the cats off. It'd of course only need to trigger for a few seconds until the cat has gone - and using a Raspberry Pi might be well overkill for it, but offloading the capability might reveal a good result.
The shopping list
Back in April, I took stock of the parts I had. Several Raspberry Pi Zero's (that were to be used for the controller project), some Raspberry Pi 2's and 3's, a Raspberry Pi camera, some crimpers and that's really about it. I jumped on Amazon and Core Electronics website to buy some parts. By the way, if you're following this to build your own - I'd strongly recommend not just buying everything in the list - I really didn't plan this part well and probably bought some unnecessary equipment here.
- 3/4" Solenoid Valve for connecting the garden hose to.
- 4 Channel Relay Board for the Raspberry Pi.
- Lots of Dupoint Wires and other hookup wire
- 8 x AA and a 9V battery holder
- DC Barrel Jacks
- Terminal Blocks
This would be a bit of a stock pile such that I could begin working on "something".
The first build, kind of...
The package of miscellaneous parts arrived and I got to work stripping some wires, putting some crimp terminals and spades on the end of wires from some surplus auto equipment I had lying around. I've also connected some cameras up to get started with some kind of ML. My desk looked like the below for a few days.

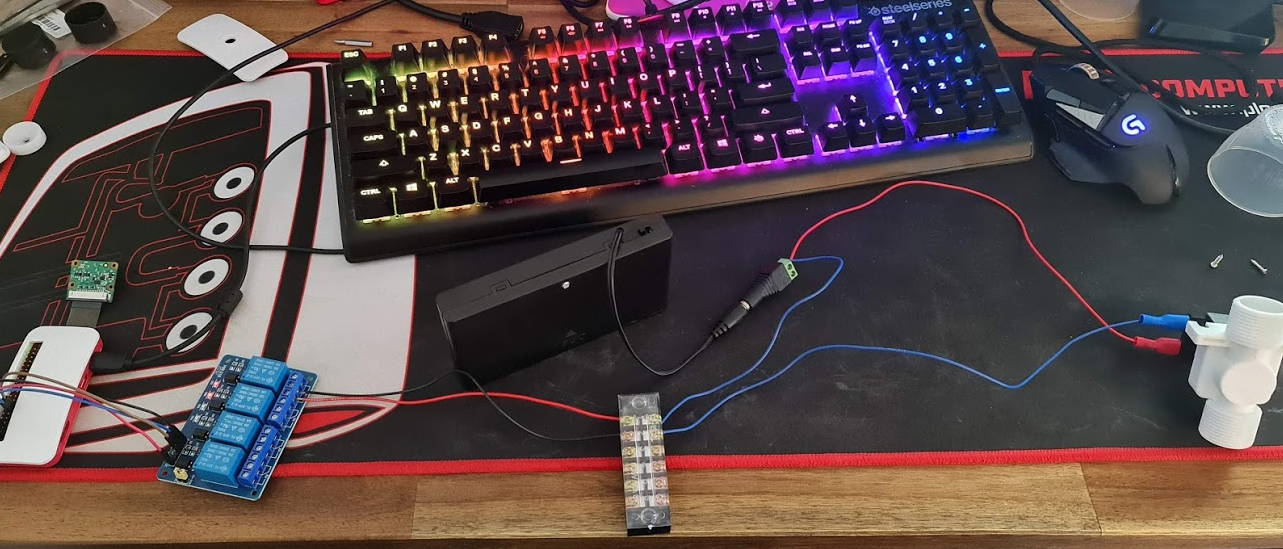
I'm mildly excited at this point - having had to fight Python and dependency issues, I've managed to get a small script to turn on and off some pins working on the dreadfully slow Raspberry Pi Zero. I mean, who knew that having Python 2.7 and 3.5 on the same distribution would cause as many issues (do I use pip or pip3, python or python3?). There's a certain sense of achievement you get when you manage to control a physical object. Perhaps it's the sound of a relay clicking and a solenoid *thump* that makes all the difference.
from gpiozero import LED
from time import sleep
hose = LED(17)
while True:
hose.on()
sleep(1000)
hose.off()
sleep(1000)The above script won't win any prizes for creativeness by any means, but that's really how simple it is to start turning stuff on and off. I'm not exactly a fan of Python and I dislike YAML for similar reasons. When you get used to C-style syntax, the mark up makes it pretty easy to place code the way you want to see it. It's fair to say I've developed my own preferred styles for laying out code so moving to a different language that also removes some of these "features" can feel unpleasant. But this is where I think I made a mistake.
I figured that I've been working with Typescript for around five years now, surely these examples are available in Node.js. Of course, there absolutely were examples - there just weren't very many of them compared to Python. When you start going down the Machine Learning path on the other hand, things get a lot murkier and in some cases you end up with Javascript wrappers for Python scripts of which are wrappers for C libraries themselves. This doesn't strike me as robust enough to have such a chain of possible failure points. To add to it all, the Raspberry Pi Zero is also only Armv6 capable - Node.js stopped supporting this architecture sometime in 2019. But I know how to write a basic express app in Node.js so I gave it a good go.
Before I knew it, I had imported onoff, lodash, fs, lowdb, fs, cors, nodemon and started scaffolding some API endpoints. After all, any logic I have that detects images from a camera will need to pass detections to an API method - this would allow some abstraction to take place. With Docker installed on the Raspberry Pi Zero, I'd eventually build an image based on the balenalib/raspberry-pi-node image.
NB: Which by the way, if you're trying to build containers to run NodeJS on Raspberry Pi Zero hardware, the following snippet will be super useful. There was a lot of trial and error to get this exact package and image for the job...
FROM balenalib/raspberry-pi-node AS base
RUN install_packages make gcc build-essential python3 influxdbA word of warning, it's not a great idea to build these images on the Raspberry Pi Zero directly unless your idea of fun is to spend 30 minutes waiting for all the dependencies to compile and install. If you don't get your multi-stage builds right, this becomes a lot more fun when you have an error further down in your Dockerfile. As I learned through building these images, they are multi-platform by default so building them on a far superior computer and pushing them to a shared private repository was a really good way to handle the compile time slowdown issue.
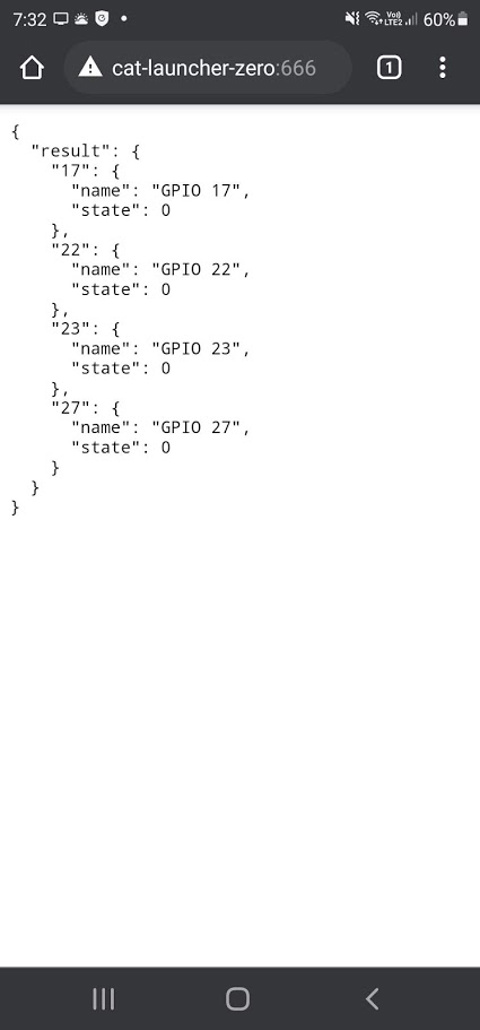
Suffice to say though, I managed to build something that would respond to commands like:-
- /gpio/{pin}/{state}/{timer?} - where pin = GPIO Pin number, state = on or off and timer = how long (0 = indefinitely).
Pretty simple stuff. Or at least I thought it was. Things kind of worked - you need various levels of privilege escalation to get this thing working but perhaps the biggest issue was that I'd just spent a lot of time coding something that really didn't need to be this complicated. But it did work, so I put the image into a Docker Compose script, set to always run and loaded it in a box.

Machine Learning
Before, I mentioned Python having a good set of resources available especially when it comes to tinkering about on a Raspberry Pi. Having powered up the Raspberry Pi 2 I had lying around, I connected the camera to it and ran a few example Python scripts on it to see what kind of framerate you could expect - having not done much with Object Detection beyond a proof of concept project at work with Amazon Rekognition.
The first example I downloaded revealed some success - it wasn't overly fast, maybe 3-4 FPS but it could pick up some things like monitors, chairs and teddy bears. I wish I had kept a photo of this one.
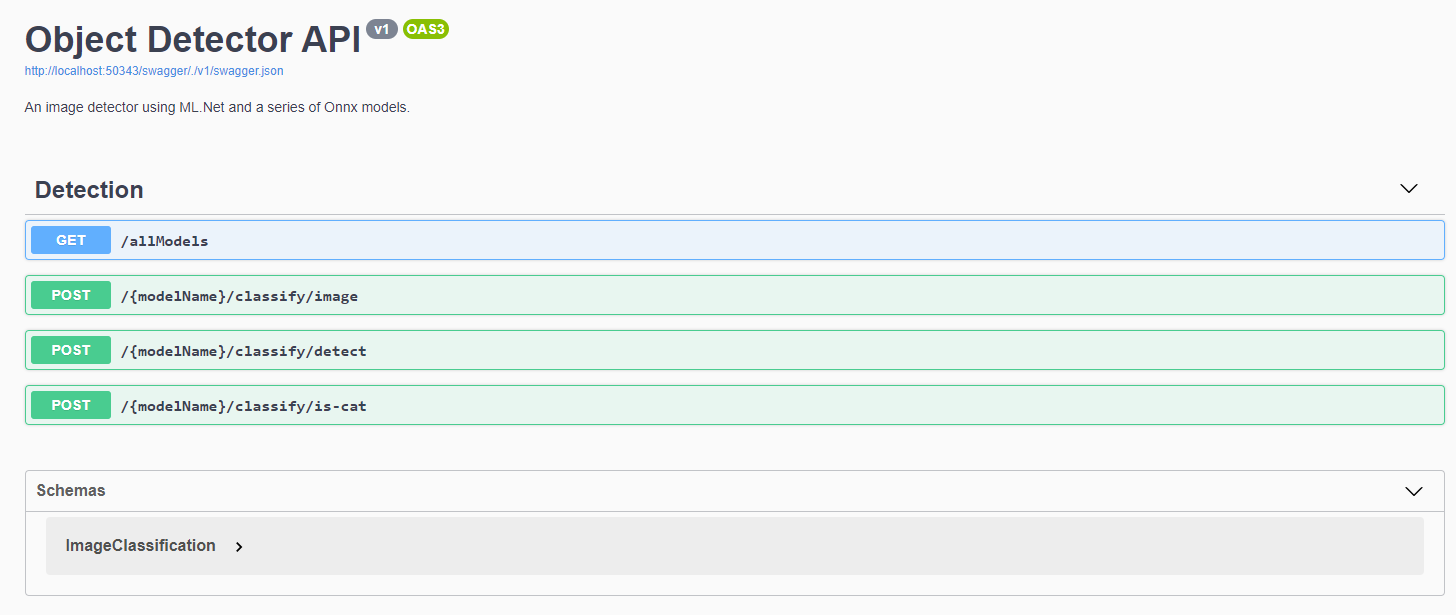
All well and good if I want to use this particular library and run the application on the Pi itself, but it definitely wasn't great at detecting cats nor was it very fast at doing so. If I'm going to start writing some serious logic - it's time to do some learning. Microsoft had recently announced ML.Net having a feature update and I figured instead of learning more Python, I could put some C# skills to use. I stumbled across some examples on getting TinyYOLO v3 running on ML.Net using Onnx. There's a lot of material to cover here, perhaps for another blog post. But if you're starting out in Machine Learning and think reading this one example is going to solve all of your Machine Learning queries, you'd be absolutely wrong.
When I started implementing pipelines, using Neutron to work out how to invoke the model and learning about how to reduce image quality to speed up image detection - it becomes overwhelming very quick, and most of your object detection labels and the way scores are calculated changes dramatically. Different settings start to throw out bounding boxes and even what's actually being detected. None-the-less, I'm only interested in "Cats" and "not Cats" - so I figured this should be relatively straightforward. With my API in place and several algorithms, it's time to test.
With so much excitement, I begin uploading some images. By about the fourth image, I was immediately excited that the bounding box is perfectly around the dog, and it detected a dog. That percentage could have been a little bit higher, but who cares - it detected the right thing!

Some more pictures in, and we finally get to a pretty obvious cat from some Aiptek camera back in the day (remember those guys?). The percentage wasn't exactly super high, but you can only see two legs. Maybe that's why ;)

Alright - time to give it something obvious - two dogs and a cat. What do we get? - bzzt. Nothing.

Suffice to say, I went through a lot of different kinds of models to try and determine the best one for the job. Some were slow, some were fast, nearly all of them were only producing < 1 frame per second on non-GPU accelerated hardware. I even had a go at general image classification - and despite only having two kinds of things I was looking for, most algorithms there were basically treating things as "Cat" or "Not Cat" - rather than a whole list of possible outcomes. But - I did have some success so I would proceed to bundling this up in an image with all available models ready for testing.
The RTSP debacle...
It was clear early on that the Raspberry Pi's camera was pretty ordinary. I had however purchased a Ubiquiti Camera - the Bullet G4 and mounted it to the front of house. There's a few cool things that this particular camera supports - RTSP is probably the most important as well as some Motion Detection that I can hook into. All I needed was an RTSP library to get images from the stream (short of writing my own RTSP interpreter - surely I'm not the only person in the world consuming this feed), and I'd pass it onto the detection API before deciding whether I wanted to turn the relay on (and for how long).
Well - this turned out to be an even bigger hurdle than the Machine Learning itself. After traversing through Github and Nuget for libraries, it was pretty clear that RTSP feeds can be vastly different, and most were designed for particular cameras or use cases. In particular, the Eufy camera I had before kept breaking most C# libraries I was trying to use, except for Emgu.CV.
Turns out, this Machine Learning library does have a fully baked RTSP reader and it works fine if you're running everything on Windows. I was not - my servers are mostly Linux and anything Windows are my desktop PCs which are used for a lot of other things (and despite having Solar Panels on the roof for daytime, I don't want to be chewing up that much electricity for the one or two times a night a cat may be detected). Despite following build instructions for Ubuntu, I could never get the library working without throwing many dependency errors.
The Emgu.CV library requires a few dependencies:-
- Emgu.CV
- Emgu.CV.runtime.windows
- Emgu.CV.UI
With these installed, connecting to the RTSP stream is fairly trivial. You create a VideoCapture object, subscribe to the ImageGrabbed event and start the feed. You can hook into various error methods to attempt a retry in case of disconnect but for the sake of brevity in the code below, I've kept it super simple as it's useful if you ever need this, at least in a Windows environment.
var capture = new VideoCapture("rtsp://...");
capture.ImageGrabbed += ImageGrabbedHandler;
capture.Start();
void ImageGrabbedHandler(object sender, System.EventArgs e)
{
var frame = new Mat();
var captureRetrieved = Capture.Retrieve(frame);
if (captureRetrieved)
{
var frameImage = frame.ToImage<Bgr, byte>();
var bitmapImage = frameImage.ToBitmap();
// throw this bitmap whereever it needs to go
}
}Unfortunately, this is where the Cat Launcher venture ends. Having installed the camera and attempted some image detections, it's clear the algorithms aren't quite working. In some cases, it was detecting the local neighbourhood kids as 'Cats' from time to time, and 'Cats' as 'Dogs' and various other anomalies. That's not to say all of this is wasted, I'll definitely be picking it up again. But as I headed into Autumn and Winter, the cats don't tend to spend too much time digging up the lawn. Or perhaps the Jack Russell that was staying with us may have helped keep some of the cats away. In any case, until these images can correctly identify a Cat, this project is on hold.

In the meantime, and for my next post - a new project cropped up in May to automate a gardening system. Having installed a bunch of Planter Boxes to grow some veggies, the same kind of system at least without the Machine Learning component is required. So I've pivoted to building an automated gardening system in the meantime. Stay tuned for Part 2!